在當今科技飛速發(fā)展的時代,智慧工廠已從昔日的夢想逐步轉變?yōu)楝F(xiàn)實���。作為傳統(tǒng)工廠的智能化升級版���,智慧工廠巧妙融合了物聯(lián)網(wǎng)�、云計算���、大數(shù)據(jù)及人工智能等前沿技術���,構建了一個全方位數(shù)字化、智能化的生產(chǎn)體系����。在這場技術變革中,車載物聯(lián)網(wǎng)網(wǎng)關憑借其獨特的功能與顯著優(yōu)勢���,為智慧工廠內(nèi)的物流運輸自動化提供了堅實的基石�����。
一����、智慧工廠物流運輸中的車載物聯(lián)網(wǎng)網(wǎng)關
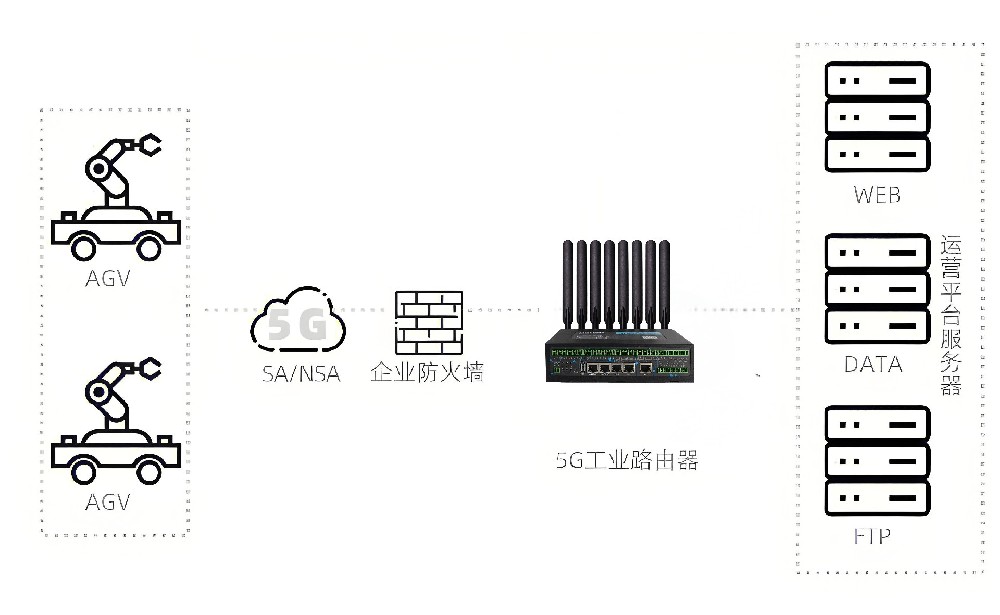
(圖源網(wǎng)絡,侵刪)
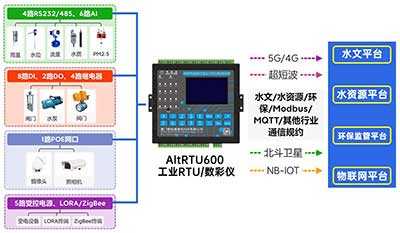
智慧工廠的高效運營離不開物流運輸?shù)牧鲿撑c精準��。在此背景下�����,自動導引車(AGV)憑借其靈活性與高效性��,在智慧工廠的物流運輸中占據(jù)了主導地位���。AGV能夠依據(jù)預設路徑自動行駛,精確完成物料搬運任務�����。而在此過程中�,車載物聯(lián)網(wǎng)網(wǎng)關發(fā)揮了至關重要的作用。
網(wǎng)關作為信息的匯聚與傳輸節(jié)點����,不僅能夠全面收集AGV上各類傳感器的數(shù)據(jù),如位置信息�、行駛速度及電量狀態(tài)等,還能與AGV的車載執(zhí)行裝置及控制系統(tǒng)實現(xiàn)無縫對接��。這一特性使得技術人員能夠遠程監(jiān)控AGV的運行狀態(tài),并進行精確的運動控制��,從而確保物流運輸?shù)臏蚀_性與時效性����。
此外,車載物聯(lián)網(wǎng)網(wǎng)關還能將物流車輛的實時狀態(tài)與位置信息上傳至云平臺�����。云平臺通過對這些數(shù)據(jù)的深入分析��,能夠優(yōu)化車輛調(diào)度策略�,實現(xiàn)路徑規(guī)劃的智能化。這一舉措不僅顯著提升了物流運輸?shù)男?,還有效降低了運輸成本。
在智慧工廠中���,駕駛員的行為監(jiān)控同樣至關重要���。車載物聯(lián)網(wǎng)網(wǎng)關能夠連接駕駛員狀態(tài)監(jiān)測系統(tǒng),實時監(jiān)測駕駛員的生理指標���,如脈搏����、心率等,以及駕駛過程中的疲勞程度���。一旦系統(tǒng)檢測到駕駛員處于疲勞狀態(tài)�,便會立即發(fā)出預警����,從而有效避免困倦駕駛帶來的安全隱患�����。
同時�����,車載物聯(lián)網(wǎng)網(wǎng)關還能匯集車輛狀態(tài)�、能源消耗及故障代碼等行車數(shù)據(jù)����,并將其上傳至云平臺進行統(tǒng)計分析。這些數(shù)據(jù)為車輛的健康管理����、保養(yǎng)維護及故障預測提供了有力支持���,確保了智慧工廠內(nèi)物流運輸?shù)某掷m(xù)穩(wěn)定。
二、車載物聯(lián)網(wǎng)網(wǎng)關在無人車領域的深度運用
隨著自動駕駛技術的日益成熟���,無人車已成為未來出行的重要發(fā)展方向���。在無人車領域����,車載物聯(lián)網(wǎng)網(wǎng)關同樣發(fā)揮著不可或缺的作用。
無人車需依賴激光雷達�、毫米波雷達、攝像頭等多種傳感器來感知周圍環(huán)境���,以實現(xiàn)自主決策與行駛。車載物聯(lián)網(wǎng)網(wǎng)關則能夠將這些傳感器的數(shù)據(jù)統(tǒng)一收集并上傳至自動駕駛系統(tǒng)��,使自動駕駛系統(tǒng)能夠更全面地掌握周圍環(huán)境信息�����,從而做出更為準確的決策��。
同時���,車載物聯(lián)網(wǎng)網(wǎng)關還能實現(xiàn)無人車與云服務的互聯(lián)互通。通過這一連接����,無人車能夠實時上傳遙測數(shù)據(jù)���、遠程存儲數(shù)據(jù)�,并下載高精地圖等關鍵信息�����。這些信息為無人車的精準行駛、高效調(diào)度及路徑規(guī)劃提供了有力支持��。
在新能源汽車領域�,車載物聯(lián)網(wǎng)網(wǎng)關同樣發(fā)揮著重要作用。它能夠連接車載電池管理系統(tǒng)�,實時監(jiān)測電池狀態(tài),優(yōu)化電量分配策略���。這一舉措不僅提高了新能源汽車的經(jīng)濟性�,還確保了其在使用過程中的安全性與可靠性��。
網(wǎng)絡信息安全是無人車領域不可忽視的重要議題���。車載物聯(lián)網(wǎng)網(wǎng)關具備網(wǎng)絡隔離�����、防火墻����、入侵檢測等多種安全功能��,能夠有效抵御黑客入侵與惡意攻擊�。這一特性為無人車的安全行駛提供了堅實保障���。
此外,車載物聯(lián)網(wǎng)網(wǎng)關還能實現(xiàn)無人車之間的V2V通信�。這一功能使得無人車能夠協(xié)同工作,共同完成復雜任務��。例如�����,在交通擁堵時���,無人車可通過V2V通信實現(xiàn)協(xié)調(diào)行駛�����,提高交通效率���;在緊急情況下�����,無人車可通過V2V通信共享信息���,共同應對風險與挑戰(zhàn)�。
基于車載感知的深度學習算法,無人車已能夠實現(xiàn)較為精準的自動泊車功能��。而車載物聯(lián)網(wǎng)網(wǎng)關匯集的傳感器信息則能夠進一步提升自動泊車的性能與精度���。這使得無人車在停車過程中能夠更準確地判斷車位大小與位置信息��,從而實現(xiàn)更加高效����、便捷的停車體驗���。
三��、車載網(wǎng)關與V2X通信的融合發(fā)展
車載物聯(lián)網(wǎng)網(wǎng)關與V2X通信的融合發(fā)展已成為車聯(lián)網(wǎng)領域的重要趨勢��。V2X作為車聯(lián)網(wǎng)的一種重要通信技術�,實現(xiàn)了車輛與周邊一切物體及網(wǎng)絡的互聯(lián)互通����。作為實現(xiàn)車載設備互聯(lián)互通的關鍵設備之一,車載網(wǎng)關自然成為了V2X通信的重要載體與支撐���。
車載網(wǎng)關支持V2X通信協(xié)議���,能夠通過DSRC�、cellular等多種方式實現(xiàn)車車通信與路車協(xié)作�。這一特性不僅有助于改善交通安全狀況、優(yōu)化道路使用效率���,還能為智能交通系統(tǒng)�、車路協(xié)同系統(tǒng)提供豐富的車輛信息支持���。同時���,車載網(wǎng)關還能采集汽車底層數(shù)據(jù),并與云端實現(xiàn)數(shù)據(jù)交換與共享�����。這一功能為自動駕駛決策提供了有力支持與保障��。
基于車載網(wǎng)關與V2X通信技術的融合應用�,交通管理部門能夠與車輛實現(xiàn)信息互通與共享����。這使得交通管理部門能夠進行更加精準的交通指揮與調(diào)度�、遠程車輛診斷與故障預測等工作�。同時,V2X通信對車載網(wǎng)關的實時性�����、可靠性及安全性等方面提出了更高要求��。車載網(wǎng)關需確保V2X通信的低延遲����、高可用性及安全性等特性,以推動車聯(lián)網(wǎng)技術的快速發(fā)展與廣泛應用��。
無線路由器|全網(wǎng)通網(wǎng)關|DTU|RTU|數(shù)采儀|遙測終端機|嵌入式網(wǎng)關|云平臺開發(fā)-廈門愛陸通")